Синхронный электродвигатель
Синхронный двигатель – тип электрических машин с равной частотой вращения вала и крутящегося магнитного поля неподвижного узла. За счет относительно сложной конструкции такие двигатели не так распространены, как асинхронные двигатели, однако, в некоторых случаях являются практически незаменимыми.
Рассмотрим конструкцию синхронных электродвигателей, их преимущества и недостатки.
Принцип работы
Принцип действия синхронных электрических машин основан на сцеплении крутящегося магнитного поля статора и постоянного магнитного поля ротора.
При этом концепция та же, что у асинхронного двигателя: при подаче трехфазного напряжения на обмотки неподвижного узла, сдвинутые на 1200, возникает магнитное поле с попеременно меняющимися полюсами.
При этом на обмотки ротора подается постоянный ток, который наводит постоянное магнитное поле.
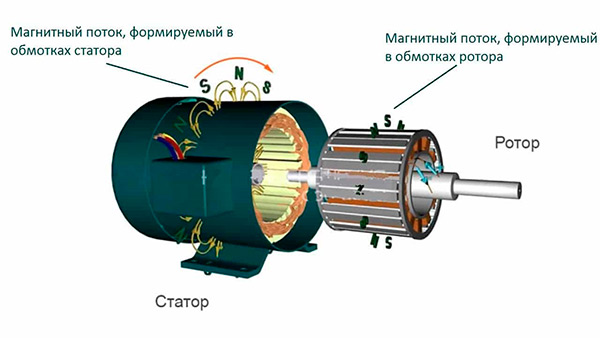
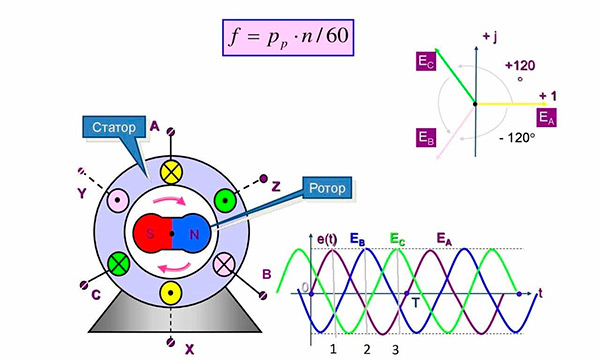
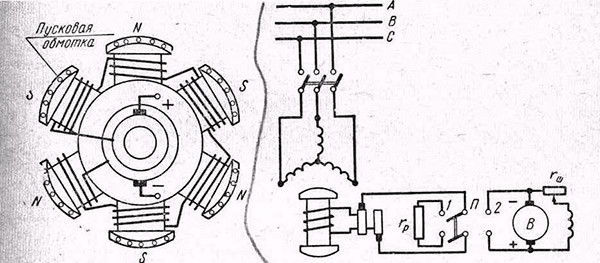
При подаче переменного трехфазного напряжения на статор и постоянного тока на ротор, разноименные полюса магнитного поля ротора будут притягиваться к соответствующим полюсам вращающегося поля статора. При таком взаимодействии возникает крутящий момент, который вращает вал. При этом его скорость будет равна частоте вращающегося магнитного поля, наводимого обмотками неподвижного узла. Наглядно принцип действия синхронных электрических машин представлен на рисунке ниже.
Конструкция и виды синхронных двигателей
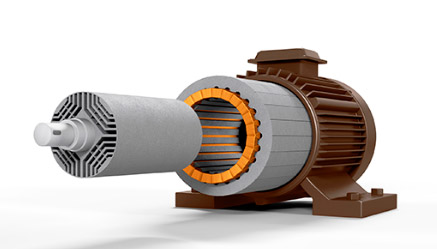
Синхронные двигатели с роторными обмотками – самые распространенные электрические машины такого типа. Силовые агрегаты состоят из следующих основных узлов:
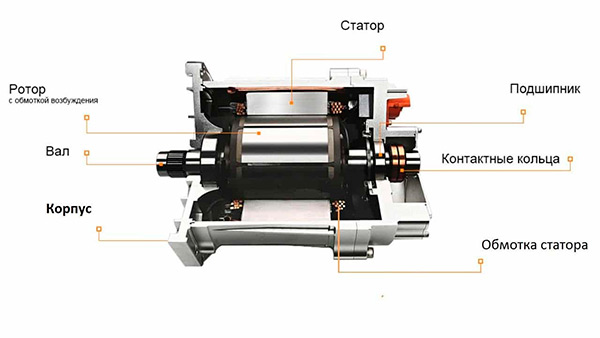
- Станины и корпуса. Элементы конструкции предназначены для размещения других узлов и опоры.
- Статора. Неподвижная часть включает сердечник и трехфазные обмотки переменного тока.
- Ротора. Вращающийся узел состоит из магнитопровода с уложенной в нем обмотки постоянного тока.
- Вала. Элемент конструкции предназначен для подключения механической нагрузки, на нем также размещены катушки возбуждения.
- Контактных колец. Узлы предназначены для подачи постоянного напряжения на обмотки ротора.
Конструкция синхронных двигателей может различаться в зависимости от вида. Например, в электрических машинах типа СДПМ для создания магнитного поля применяют постоянные магниты, такие электродвигатели также не имеют электрических колец. Различают роторы явно и неявнополюсной конструкции. Первые применяют в двигателях приводов низкооборотистого оборудования, работающего при значительной нагрузке.
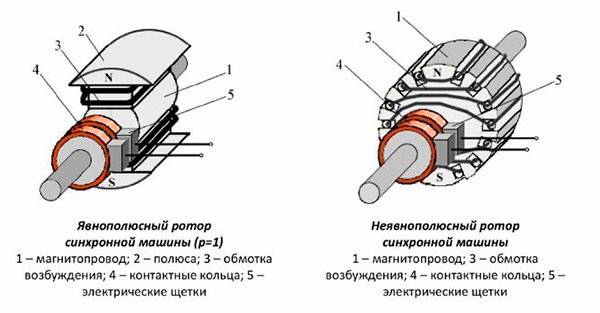
Электродвигатели с неявнополюсным вращающимся узлом используют в скоростных приводах. По конструкции статора различают синхронные электрические машины с распределенной (на рисунке слева) и сосредоточенной обмоткой (на рисунке справа).

В асинхронных двигателях ЭДС вращающегося узла наводится под воздействием магнитного поля статора. Вследствие этого возникает разница между скоростями вращения магнитного поля и ротора, называемая скольжением. Синхронные электрические машины не имеют скольжения, благодаря чему такие двигатели можно применять в приводах точных механизмов.
К преимуществам синхронных двигателей с роторными обмотками также относят высокую перегрузочную способность, увеченный к.п.д (может достигать до 95%), пропорциональную зависимость момента на валу от питающего напряжения, стабильную скорость при переменной нагрузке. К недостаткам синхронных машин относят относительную сложность конструкции, наличие источника постоянного тока для обмотки возбуждения, сложность пусковой схемы.
Способы пуска и возбуждения синхронных двигателей
Синхронные машины требуют источник постоянного тока для питания обмотки ротора. Наибольшее распространение получили статические системы возбуждения на базе тиристорных преобразователей. Системы с генератором постоянного тока на валу электродвигателя уже практически не применяют.
Электропитание тиристорных возбудителей осуществляется от трансформатора, включенного в одну сеть с двигателем. Системы позволяют регулировать напряжение, коэффициент мощности, величину реактивной составляющей обмоток статора.
Синхронные электрические машины не могут запускаться прямым включением в сеть, так как смена полюсов вращающегося магнитного поля происходит слишком быстро, из-за инерции разгон ротора до синхронной скорости невозможен.
Существует несколько схем пуска электродвигателей синхронного типа.
Двигательный. Запуск синхронного двигателя осуществляется за счет разгона ротора до синхронной частоты при помощи вспомогательной электрической машины. При этом электродвигатель включается в сеть после достижения синхронной частоты, после чего вспомогательный двигатель останавливают. Двигательные схемы считаются морально устаревшими, из-за высокой стоимости и значительных габаритов и массы их уже практически не применяют.
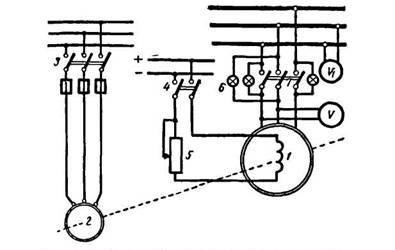
Асинхронный. Синхронные двигатели с асинхронным стартом имеют дополнительную обмотку типа «беличья клетка» на полюсных наконечниках ротора. Пуск электродвигателя осуществляется при отсутствии постоянного тока в обмотке возбуждения, как у асинхронных электрических машин. После разгона до скорости, близкой к синхронной, на роторную катушку подают постоянный ток, двигатель начинает работать в синхронном режиме. Во время старта, до входа в синхронизм, роторную обмотку замыкают на сопротивление, это необходимо для ограничения тока, наводимого полем статора при пуске и разгоне. Такой метод позволяет осуществлять запуск синхронной машины напрямую от сети. К недостаткам относят значительный пусковой ток, затруднение старта под нагрузкой.
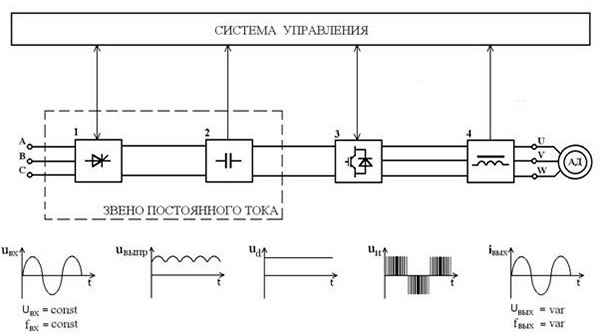
Частотный. При этом электродвигатель подключают к частотному преобразователю. Пуск электрической машины осуществляется путем подачи напряжения низкой частоты и плавного ее увеличения до номинального значения, двигатель все время работает в режиме синхронизма. Такой способ позволяет уменьшить время переходных процессов и пусковые токи, снизить тепловые нагрузки, осуществлять пуск синхронных электрических машин под нагрузкой. Недостатком способа является относительно высокая цена специализированного преобразователя частоты. Частотный пуск – наиболее перспективный, он позволяет устранить многие недоставки синхронных электрических машин.
Типы синхронных электродвигателей
Электрические силовые агрегаты с синхронной частотой вращения применяют для решений приводов самого различного назначения: оборудования для инженерных систем и промышленности, бытовых и производственных механизмов. Кроме электрических машин с роторными обмотками, существует еще несколько типов синхронных двигателей. Рассмотрим их типы и конструкцию подробнее.
Двигатели с постоянными магнитами
Конструкция СДПМ напоминает синхронные двигатели с обмотками ротора. Главное отличие – наличие постоянных магнитов на вращающейся части вместо обмоток. Электродвигатели с постоянными магнитами не требуют источника постоянного тока для питания обмотки возбуждения.
- Упрощенная в сравнении синхронным двигателем с обмотками ротора конструкция.
- Увеличенный к.п.д.
- Улучшенное отношение масса/мощность.
- Возможность точного управления моментом и скоростью.
СДПМ имеют более высокую стоимость, что несколько ограничивает их использование. Область применения электрических машин – приводы средней и малой мощности.
Синхронный реактивный двигатель
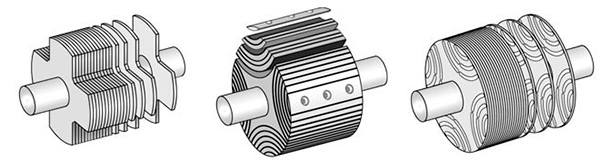
Вращение вала таких электродвигателей осуществляется за счет разности магнитной проводимости ротора в поперечной и продольной плоскости. Чем больше эти значения отличаются, тем выше крутящий момент на валу электрической машины. Конструкция статора реактивных электродвигателей не отличается от стандартных синхронных электрических машин с распределенной или сосредоточенной трехфазной обмоткой.
Варианты конструкции крутящейся части: с явновыраженными полюсами (слева), аксиально-расслоенная (по середине) и поперечно-расслоенная (справа).
Синхронный реактивный двигатель обладает следующими достоинствами:
- Простая конструкция ротора без магнитов и обмоток.
- Небольшой нагрев.
- Низкая инеркцинность.
- Возможность задания скорости в широком диапазоне.
К недостаткам электрических машин относят невысокий коэффициент мощности. Область применения таких двигателей – приводы маломощного оборудования и механизмов.
Гистерезисный двигатель
Принцип действия гистерезисных электрических машин основан на явлении гитерезиса магнитовтвердых материлов. Крутящий момент возникает под действием остаточного намагничивания ротора, которое осуществляется магнитным полем статора электродвигателя, в остальном принцип работы электродвиагателей сходен с СДПМ.
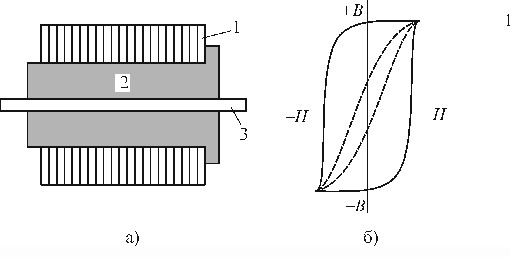
Вращающаяся часть гистерезисных двигателей имеет неявнополюсную сборуную конструкцию. К приемуществам электрических машин относятся:
- Простой старт без дополнительной аппаратуры.
- Отсутвие высоких пусковых токов.
- Плавный вход в синхронный режим.
- Простая конструкция.
- Более высокий коэффициент мощности чем у реактивных синхронных двигателей.
К недостаткам относят высокую цену, которая обсуловлена стоимостью магнитотвердых материалов с широкой петлей гистерезиса для ротора.
Реактивно-гистерезисный электродвигатель
Реактивно-гистерезисный двигатели – тип синхронных электрических машин с явнополюсным ротаторном. Пуск осуществляется за счет крутящего момента, возникающего при взаимодействии вращающегося магнитного поля статора и гистерезиса ротора.

Дальнейшая работа двигателя в синхронном режиме – за счет реактивного момента и остаточного намагничивания. Таким образом, двигатели совмещают достоинства реактивных и гистерезисных электрических машин:
- Простота конструкции.
- Самозапуск без дополнительного оборудования.
- Возможность работы от однофазной электросети.
К недостаткам относятся низкие КПД и cosφ. Область применения реактивно-гистерезисных двигателей: микроприводы различного назначения.
Что синхронный серводвигатель это такое
Двигатель серии OMSRV-S — это бесщеточный синхронный серводвигатель переменного тока с постоянным магнитом.
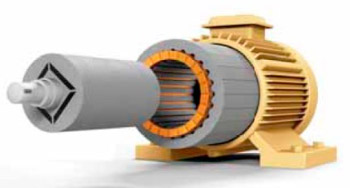
Синхронный серводвигатель состоит из статора, ротора с постоянным магнитом и энкодера высокого разрешения (например, резольвера или инкрементного энкодера). Ротор представляет собой цилиндр, закрепленный на своей оси вращения и удерживаемый в этом положении шарикоподшипниками; на нем установлены чрезвычайно мощные магниты, создающие статическое магнитное поле. Статор представляет собой полый цилиндр, в котором находится ротор; внутри находятся обмотки, через которые проходят токи, вращающие ротор.
Синхронные серводвигатели серии OMSRV-S могут использоваться во многих областях, таких как станки, текстильные машины, машины для производства пластмасс, печатные машины, машины для печати печатных форм, манипуляции с роботами, машины для обработки древесины, машины специального назначения.
Что синхронный серводвигатель это такое

12 июля 2021
Сложно представить современную жизнь без электродвигателей. Они значительно улучшают, облегчают нашу жизнь и делают ее комфортной.
⠀
Одной из разновидностей электродвигателей являются синхронные двигатели, которые несмотря на технический прогресс, продолжают использоваться. Расскажем о них подробнее.
⠀
Синхронный двигатель — это устройство, которое преобразует электрическую энергию в механическую.
⠀
Как и любой двигатель он состоит из двух основных частей: статора и ротора. Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля.
⠀
Статор— неподвижная часть- корпус и сердечник, необходим для размещения рабочей обмотки.
⠀
Ротор — вращающаяся часть. У синхронных электродвигателей роторы бывают двух типов:
⠀
▪явнополюсные — в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
⠀
▪️неявнополюсные — полюс не выделяется, такие модели устанавливают для высоких скоростей.
⠀
Синхронные двигатели отличаются от асинхронных большей мощностью и полезной нагрузкой, поэтому используются в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Более того, его можно использовать как генератор.
⠀
Особенности синхронных электродвигателей:
⠀
▪ синхронный двигатель работает при высоком значении коэффициента мощности;
⠀
▪️ на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
⠀
▪️синхронные электродвигатели при уменьшении напряжения сохраняют свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
⠀
Можно сказать, что из-за своих преимуществ, синхронные двигатели широко используются там, где необходим непрерывный процесс и нет частых запусков.
Какой двигатель, по вашему мнению, обладает более широкими возможностями?
Форум о полимерах ПластЭксперт
Крупнейшая независимая площадка для обсуждения вопросов производства и переработки пластмасс и эластомеров различными способами. Рекомендации ведущих специалистов.
- ПластЭкспертФорум о полимерахО вопросах эксплуатации, ремонте, техническом обслуживании оборудования/About service, reparing and maitenance of equipmentТермопластавтоматы не могут без ремонта/Injection molding machines need in repair
- Поиск
- Темы без ответов
- Активные темы
Синхронный серводвигатель определяет всё.
— «Чудеса» случившиеся с вашими дорогими Куаси, Хмельницкими, Одесскими, Белорусскими, Русскими, Немецкими, Китайскими, Итальянскими и даже Американскими машинами.
— Various cases and problems with your IMM: Kuasy from DDR, Soviet-made machines, German, Chinese, American, Italian, Belarusian made machines.
5 сообщений • Страница 1 из 1
Zhafir_1 Благодарил (а): 0 Поблагодарили: 0
Синхронный серводвигатель определяет всё.
#1 Сообщение Zhafir_1 » 20 фев 2012, 16:14
В этом посте я расскажу о самом главном узле любого ЭлТПА – серводвигателе. Начнём с истории и конечно же опишем принцип работы и основные технические характеристики.
Слово «серво» произошло от латинского слова «servus», что переводится как слуга, раб, помощник. В машиностроительных отраслях сервоприводы традиционно выполняли преимущественно вспомогательную роль (приводы подач в станках, приводы роботов и т.п.) Теперь, когда автоматизация полностью охватила все области машиностроения, доминирующее позиции заняли электроприводы, и механика машин сильно упростилась с использованием современных индивидуальных приводов взамен центрального привода.
Давайте разберемся, чем так привлекательны современные сервоприводы использующие синхронные электродвигатели.
Сервопривод — это система привода, которая в широком диапазоне регулирования скорости обеспечивает динамичные, высокоточные процессы и обеспечивает хорошую их повторяемость. Это система, предназначенная для отработки момента, скорости и позиции с заданной точностью и динамикой. Классический сервопривод состоит из двигателя, датчика позиции и системы управления, имеющей три контура регулирования (по позиции, скорости и току).
Для сервоприводов характерны следующие показатели:
• управление по скорости, по моменту или по позиции;
• диапазон регулирования скорости более 1:10000;
• статическая точность поддержания скорости по валу двигателя до 0,01%;
• точность поддержания позиции по валу двигателя;
• низкий вес и компактные размеры
Если еще совсем недавно синхронные электродвигатели применялись только в электроприводах большой мощности (во многих книгах экономически целесообразной мощностью называется мощность в 100 кВт и выше), при отсутствии необходимости регулировать частоту вращения и при длительном режиме работы, то в настоящее время эти, казавшиеся незыблемыми аксиомы, рушатся как карточный домик. Сейчас современные синхронные двигатели в составе сервоприводов могут с успехом использоваться абсолютно во всех областях. Единственное, что пока сдерживает триумфальное шествие синхронных сервоприводов — это их цена.
Синхронные серводвигатели — это трехфазные синхронные электродвигатели с возбуждением от постоянных магнитов и датчиком положения ротора, в качестве которого традиционно применяются фотоэлектрические инкрементальные энкодеры (смотрите картинку внизу поста). Отличительная особенность синхронных серводвигателей — высокая выходная мощность при любой скорости (смотрите график внизу поста) в сочетании с небольшими размерами. Их основным достоинством является очень низкий момент инерции ротора относительно крутящего момента. Это позволяет реализовать очень высокое быстродействие. Время разгона на номинальную частоту вращения за десятки миллисекунд и реверс с полной скорости в пределах одного оборота вала двигателя.
Асинхронный или синхронный двигатель?
Конструкция статора синхронных и асинхронных двигателей принципиально одинакова, но их роторы различаются: асинхронный серводвигатель имеет короткозамкнутый ротор, магнитное поле в котором создается за счет индукции; на роторе синхронного серводвигателя закреплены магниты, создающие в нем постоянное магнитное поле. Для изготовления ротора синхронных двигателей могут использоваться ферритовые магниты. Они относительно дешевы, но обеспечивают невысокий уровень индукции магнитного поля. Поэтому в последние десятилетия предпочтение отдается высокоэнергетическим магнитам на основе сплавов редкоземельных металлов, обладающих большой коэрцитивной силой. Мощные постоянные магниты, изготовленные из сплавов неодим-железо-бора и самарий-кобальта благодаря их высокой энергоемкости, существенно улучшили характеристики синхронного двигателя с магнитами на роторе при одновременном снижении массогабаритных показателей. В итоге улучшились динамические характеристики привода при снижении его габаритов.
Постоянное удешевление магнитных материалов, а также ускоряющееся развитие аппаратной базы систем управления и устройств силовой электроники сделали возможным применение сервоприводов на базе синхронных двигателей в тех областях техники, где традиционно применялись только машины постоянного тока или специальные асинхронные двигатели.
Это объясняется целым рядом конструктивных и технико-эксплуатационных преимуществ синхронных двигателей по сравнению с другими существующими типами электрических двигателей:
— бесконтактность и отсутствие узлов, требующих обслуживания.
Отсутствие у синхронных электродвигателей скользящих электрических контактов существенно повышает их ресурс и надежность по сравнению с электродвигателями постоянного тока или асинхронными двигателями с фазным ротором, расширяя диапазон достижимых частот вращения.
— большая перегрузочная способность по моменту (кратковременно допустимый момент и ток синхронного двигателя могут превышать номинальные значения в 5 и более раз);
— высокое быстродействие в переходных процессах по моменту;
— абсолютно жесткая механическая характеристика и практически неограниченный диапазон регулирования частоты вращения (1:10000 и более). Возможность регулирования частоты вращения как вниз от номинальной (с постоянством длительно допустимого и максимального моментов), так и вверх (с постоянством мощности);
— наилучшие энергетические показатели (КПД и коэффициент мощности). КПД синхронных двигателей превышает 90% и незначительно отклоняется от номинального при вариациях нагрузки, в то время как у серийных асинхронных двигателей максимальный КПД составляет не более 87,5% и существенно зависит от момента. Так, уже при половинной нагрузке на валу он может упасть до 60-70%;
— минимальные токи холостого хода;
— минимальные массогабаритные показатели при прочих равных условиях.
Так как основные электрические и магнитные потери в роторе отсутствуют, а современные редкоземельные постоянные магниты способны обеспечить максимальную индукцию в воздушном зазоре даже без концентрации потока на уровне асинхронных машин в синхронных двигателях может быть значительно повышена линейная нагрузка при сохранении суммарных потерь в машине на постоянном уровне, что и объясняет более высокую электромеханическую эффективность синхронных двигателей по сравнению с другими типами бесконтактных электродвигателей переменного тока.
В настоящее время синхронные двигатели позволяют работать в диапазоне моментов 0,5 – 100 Н-м при скорости вращения до 10000 об/мин и поддерживать высокую мощность (момент) на высоких скоростях. Все эти качества синхронного двигателя обуславливают применение сервоприводов в промышленных системах автоматики, роботах и манипуляторах, приводах подач и главного движения металлорежущих станков, координатных устройствах, принтерах и плоттерах, намоточных и лентопротяжных механизмах, прецизионных системах слежения и наведения, в авиационной и медицинской технике и конечно же при построении ТПА.
Многие компании – производители электрических термопластавтоматов заявляют о новых «поколениях» своих ЭлТПА, однако развитие электрических термопластавтоматов напрямую зависит разработок именно серводвигателей. Первые серводвигатели, применяемые в ЭлТПА, не позволяли работать с большими усилиями и очень быстро перегревались. Соответственно и первые ТПА выпущенные японскими компаниями в середине 80-х не превышали 150 тонн по усилию смыкания. Второе поколение этих производителей предлагало уже машины до 450 тонн и в первую очередь это стало возможно благодаря изготовлению более мощных сервоприводов на базе синхронных двигателей. Главным направлением совершенствования электроприводов в ближайшей перспективе будет разработка и оптимизация адаптивных «бездатчиковых» алгоритмов управления, ориентированных на микропроцессорную реализацию и обеспечивающих диапазоны регулирования с постоянством момента 1:150…200.
Вложения 1 Пиковый момент, зависящий от модели
преобразователя
2 Длительный момент, зависящий от модели
преобразователя, где:
■ nmax (в об/мин) соответствует максимальной
скорости вращения серводвигателя
■ Mmax (в Н·м) — величина пикового момента
при нулевой скорости
■ M0 (в Н·м) — величина длительного момента
при нулевой скорости Динамика.jpg (33.51 КБ) 16365 просмотров 1 — статор с обмоткой
2 — разъем для подключений
3 — датчик скорости и положения
4 — электромагнитный тормоз (используется не во всех моделях)
5 — ротор с магнитами Серводвигатель.jpg (109.6 КБ) 16365 просмотров