Как сделать робота из лего на сайте
В данном разделе выложены различные инструкции по сборке различных механизмов и роботов из конструкторов LEGO Mindstorms серии NXT и EV3. При сборке следует учитывать, что некоторые из конструкций потребуют дополнительных деталей из ресурсных наборов (каких-то деталей вам может не хватить, каких-то может вообще не быть в вашем наборе). Авторство инструкций принадлежит не мне. Если вы хотите добавить инструкцию к какому-либо набору, то напишите мне. Также большое количество различных инструкций для набора LEGO Mindstorms NXT можно найти на сайте NXT Programs.
Как сделать робота из ЛЕГО?
Ребенок мечтает сделать робота из ЛЕГО? Есть старые конструкторы, а не специализированный Mindstorms? Статья поможет найти новые идеи, вдохнуть новую жизнь в старые пластмассовые детали, сделать своими руками автоматическое устройство.

Как сделать из ЛЕГО робота. Youtube piotrek839
Каких роботов можно сделать из ЛЕГО?
Используя пластмассовые кубики, можно создать множество разных конструкций. Даже Терминатора.
Когда речь заходит о том, чтобы самостоятельно построить робота из ЛЕГО, помните об ожиданиях. Создать Терминатора мечтают многие, но не забывайте о ресурсах. Это и наличие деталей, и терпение, и желание идти до конца :-).
Робот-киборг из ЛЕГО может выглядеть по-другому:
В интернете множество видео с роботами из LEGO. И c созданными из специализированных робототехнических конструкторов, и из деталей других наборов.
Робот или не робот?
Конечно дело не в размере и количестве использованных ЛЕГО-кирпичиков. Маленький робот с интересными функциями удивит ребенка не меньше, чем громила, если он будет … «умным».
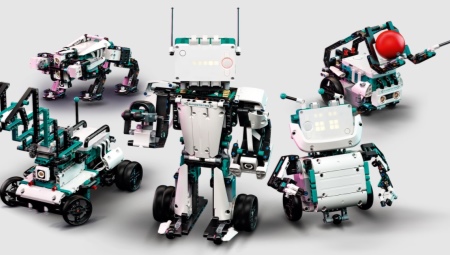
В робототехнических конструкторах помимо деталей для сборки корпуса и механизмов робота есть контроллер (мини-компьютер), датчики и двигатели и программное обеспечение.

Программируемый блок EV3 и датчики LEGO Mindstorms
С этими компонентами ребенок соберет робота, а не внешне похожую на него игрушку. Используя сенсоры и программируемый блок, можно реализовать принципы обратной связи, наделить конструкцию из LEGO «интеллектом».
Детали для сборки робота из ЛЕГО
Что же делать если у вас масса LEGO-деталей и непреодолимое желание построить из них робота? Очевидное решение — купить контроллер LEGO EV3 — слишком дорого, т.к. стоимость приближается к цене нового набора LEGO Mindstorms. Приобрести контроллер и датчики других производителей целесообразнее.
Бюджетный вариант — использовать Arduino. Эта недорогая плата станет «мозгом» создаваемого легоробота, позволит подключить сенсоры и двигателей разных производителей, реализовать идеи и развить проект самодельного робота. Платформа Arduino популярна и научиться работать с ней можно и в кружках, и самостоятельно, используя онлайн-ресурсы. При разработке робота из ЛЕГО с использованием Arduino необходимо решить, как крепить конструктивно несовместимые контроллер и датчики. Например, сделать из деталей LEGO корпусы для электроники.

Корпус для Arduino UNO из LEGO. Фото linksprite.com

Корпус для Arduino из деталей LEGO. Фото arduino.ru
Крепления электронных компонентов к элементам конструктора LEGO можно создать с помощью 3D-печати.

Держатель для сервопривода, изготовленный с использованием 3D-печати. blog.arduino.cc
Примеры роботов, сделанных из LEGO
ArGo — робот-автомобиль из конструктора Lego Technic и Arduino:

Подробнее об этом проекте здесь.
Робот-танк из деталей Lego с arduino на борту, который управляется по Wi-Fi:
Подробнее об этом проекте здесь.
Шестиногий шагающий робот-жук, сделанный из LEGO и платы Arduino. Крепления сервомоторов, рычаги, насадки на ноги и крепление Arduino к LEGO распечатаны на 3D принтере.
Сделали классного робота? Добавьте его в наш каталог проектов! Расскажите о своих успехах читателям Занимательной робототехники.
Робот из LEGO и Arduino, обходящий препятствия
Мы обожаем LEGO и Crazy Circuits [LEGO-совместимая электроника / прим. перев.], поэтому решили скомбинировать их в простого и интересного робота, умеющего обходить препятствия. Мы покажем, как собрать такого робота и подробно опишем этот процесс. Ваша версия робота может не полностью совпадать с нашей.
Приводим список необходимой электроники и деталек LEGO. Не бойтесь экспериментировать с ними.



Комплектующие
Электроника
- 1 x плата Robotics Board от Crazy Circuits
- 2 x совместимый с LEGO сервомотор полного вращения
- 1 x ультразвуковой датчик расстояния HC-SR04
- 4 x джампер-кабеля «мама-мама»
- 1 x внешний источник питания с USB
Мы использовали различные детальки, а вам рекомендуем сделать так, как вы считаете нужным, и из того, что есть у вас на руках. Важно, чтобы у вас был способ приделать сервомоторы снизу, ультразвуковой датчик – так, чтобы он смотрел вперёд, и каким-то образом закрепить плату и источник питания. Для этого можно использовать двусторонний скотч, резинки, липучку. Приводим ссылки на наши детальки в магазине BrickOwl, однако вы можете купить их где угодно, где продаётся LEGO и совместимые наборы.
- 2 x LEGO Wedge Belt Wheel (4185 / 49750)
- 1 x LEGO EV3 Technic Ball Pivots Set 5003245
- 1 x LEGO Technic Cross Block Beam 3 with Four Pins (48989 / 65489)
- 1 x LEGO Technic Brick 1 x 6 with Holes (3894)
- 2 x LEGO Axle 4 with End Stop (87083)
- 4 x LEGO Half Bushing (32123 / 42136)
- 4 x LEGO Brick 2 x 2 Round (3941 / 6143)
- 1 x LEGO Plate 6 x 12 (3028)
Шаг 1: строим шасси из LEGO

Мы начали с пластинки LEGO 6×12, это был минимальный размер, который нас устроил. Можно использовать более крупную, однако мельче уже будет сложнее.
Ширина робота определялась имеющимся у нас в наличии внешним источником питания, поскольку нам была нужна возможность вставлять его на место. Для аккумулятора большего размера потребуется робот большего размера.
Шасси должно быть достаточно высоким, чтобы на нём разместилась и батарея, и плата сверху.
Шаг 2: добавляем колёса







Каждый сервомотор нужно разместить снизу шасси. В итоге нам понадобились следующие комплектующие:
- Ось 4 LEGO со стопором (87083)
- Втулка LEGO (32123 / 42136)
- Круглый кирпичик LEGO 2 x 2 (3941 / 6143)
Как и с другими модельками LEGO, вариантов тут масса! У нас получилось с теми комплектующими, что мы перечислили, а вы можете попробовать что-нибудь другое.
Шаг 3: добавляем ролик




Наш ролик позволяет роботу кататься по плоскости на двух моторизованных колёсах, играя роль третьего колеса – так роботу легче поворачивать и двигаться.
Для его закрепления потребовались следующие детали:
- LEGO EV3 Technic Ball Pivots Set 5003245
- LEGO Technic Cross Block Beam 3 with Four Pins (48989 / 65489)
- LEGO Technic Brick 1 x 6 with Holes (3894)
Шаг 4: добавляем датчик расстояния



Ультразвуковой датчик расстояния нужно закрепить на передней части робота, чтобы он «видел», куда едет, и понимал, когда нужно остановиться, чтобы не столкнуться с препятствием.
Для датчика мы распечатали совместимый с LEGO корпус на 3D-принтере. Модель выложена на сайте Thingiverse: www.thingiverse.com/thing:3171004
Если 3D-принтера у вас нет, придумайте, как удержать датчик при помощи деталек LEGO, клейкой ленты, резинок, хомутов и т.п. Важно, чтобы он смотрел прямо – туда, куда едет робот, когда движется вперёд.
Шаг 5: добавляем плату




Плата – мозг всей операции. Она размещается наверху кубиков LEGO, поэтому её крепить легко.
Обычно плата Robotics Board используется совместно с проводящей плёнкой, позволяющей мастерить электрические цепи прямо поверх LEGO, но поскольку у нас тут всего лишь два мотора и датчик расстояния, их можно подключить напрямую к штырькам на плате.
Плату размещаем так, чтобы USB-кабель питания было легко воткнуть. Нам повезло найти в коробке с кабелями очень короткий USB-кабель.
Теперь можно подключать датчик и моторы!
По датчику: разъём echo нужно подключить к контакту 3 на плате, разъём trigger – к контакту 5, VCC – к 5 В, Gnd – к GND. Таким образом датчик будет получать питание и общаться с платой.
Затем нужно подключить каждый из моторов. Это сделать легко – коричневые провода на GND, красные – на 5 В, оранжевые – к контакту D6 для левого мотора и D9 для правого.
Шаг 6: программируем Robotics Board

Перед тем, как робот сможет работать, нужно загрузить код в микроконтроллер. Перед этим убедитесь, что у вас на компьютере установлена последняя версия Arduino IDE.
Свой код мы выложили в репозиторий на GitHub:
Код простой, в нём много комментариев, чтобы было понятно, что за что отвечает.
Вам также потребуется библиотека NewPing
Шаг 7: пускаем робота погулять



Построив робота и загрузив в него код, можно переходить к испытаниям!
Проще всего подключить внешний источник питания и дать роботу возможность ехать вперёд. Если выставить перед ним руку, он должен отодвинуться назад, повернуться и снова поехать вперёд (смотрите, чтобы он не съехал со стола!)
Мы построили простую шестиугольную «арену» из картона, чтобы роботу было где поездить. Не бойтесь экспериментировать с тем, что есть у вас.
Шаг 8: дальнейшее развитие


Если вам интересно развивать этот проект, вот вам вопросы:
— что вы узнали, собирая робота?
— что повлияло на ваш выбор деталей?
— поедет ли робот быстрее, если увеличить ему колёса?
В коде есть две переменных, исправив которые, вы измените время отката робота назад при обнаружении препятствия, и время, которое он будет поворачиваться. Попробуйте поменять goBackwardTime и turnRightTime и посмотреть, как это повлияет на поведение робота.
Похожие публикации:
- Автолюлька адамекс как крепить в машине
- Байпас что это в медицине
- Как буксировать шевроле авео
- Как определить размер тормозного диска volvo xc90
Как создать робота из Lego
Лего-роботы — это захватывающие проекты, которые не только позволяют вам раскрыть свою творческую потенцию, но и погрузиться в увлекательный мир робототехники. Собрать робота из Lego можно самостоятельно, а дальше уже программируйте его и воплотите свои идеи в жизнь.
Создание робота из Lego состоит из нескольких основных этапов. Во-первых, вам нужно определиться с моделью, которую вы хотите создать. Это может быть что угодно: от простого автомобиля до сложного робота, способного выполнять различные функции.
Во-вторых, вам понадобится Lego Mindstorms — набор конструкторов, специально разработанный для создания роботов. Он включает в себя программируемый блок, моторы, сенсоры и различные детали, необходимые для сборки вашего робота.
На третьем этапе вы приступаете к самой сборке робота. Следуя инструкциям, вы с легкостью сможете собрать основную конструкцию. Затем придумайте, какие функции вы хотите добавить, и дополните робота дополнительными деталями и механизмами.
Когда ваш робот будет полностью собран, настало время программирования. Используя программное обеспечение Lego Mindstorms со всеми его возможностями, вы сможете создать уникальные программы для вашего робота. Это позволит вам контролировать его движения, реагировать на окружающую среду и выполнять различные задачи.
Создание робота из Lego — это увлекательный и интересный процесс, который разовьет ваше творческое мышление и обучит вас основам программирования. Шаг за шагом вы сможете создать робота, который будет служить вам верным помощником и источником вдохновения.
Как собрать робота из Lego: основные этапы и советы
1. Изучите инструкцию. Прежде чем приступить к сборке, важно ознакомиться с инструкцией, которая идет в комплекте с Lego набором. В ней будут содержаться пошаговые указания и схемы, которые помогут вам собрать робота правильно.
2. Организуйте рабочее место. Прежде чем приступить к сборке, убедитесь, что у вас есть все необходимые детали. Разложите их на столе или любой другой рабочей поверхности, чтобы было удобно искать нужный элемент в процессе работы.
3. Следуйте инструкции. Важно придерживаться инструкции и собирать робота пошагово. Не пропускайте шаги и не меняйте порядок сборки, чтобы избежать ошибок.
4. Будьте внимательны. При сборке робота, особенно если это ваш первый опыт, будьте очень внимательны. Убедитесь, что все детали правильно соединены и надежно закреплены, чтобы робот не распался во время его работы.
5. Не бойтесь экспериментировать. Если вы уже имеете опыт в сборке роботов из Lego, не стесняйтесь экспериментировать и добавлять свои детали или функции. Это поможет вам развить свою креативность и создать по-настоящему уникального робота.
6. Берегите инструкции и детали. После завершения сборки не выбрасывайте инструкции и не разбирайте робота, чтобы использовать детали для других моделей. Если вы захотите в будущем собрать эту модель снова или продемонстрировать ее другим людям, вам понадобятся и инструкции, и все детали.
7. Наслаждайтесь процессом и результатом. Сборка робота из Lego – это увлекательная и творческая деятельность. Не спешите и наслаждайтесь процессом, а когда ваш робот будет готов, радуйтесь его работе и возможности открыть для себя новый мир робототехники.
Выбор набора Lego и концепции робота
Процесс создания робота из Lego начинается с выбора подходящего набора. Вам следует учитывать свой уровень опыта, предпочтения по функциональности и возможности набора. Lego предлагает широкий ассортимент наборов для создания роботов, начиная от простых конструкций для начинающих, и заканчивая продвинутыми наборами с множеством деталей и возможностями.
Если вы только начинаете знакомство с робототехникой, рекомендуется выбрать базовый набор, который включает в себя все необходимые детали и инструкции по сборке. Такие наборы обычно содержат простые модели, позволяющие освоить основные концепции и навыки.
Если у вас уже есть опыт работы с Lego, вы можете выбрать более сложный набор, который предлагает дополнительные функциональные возможности. Некоторые наборы Lego включают в себя специализированные детали, такие как двигатели, сенсоры или программируемые блоки, что позволяет создавать более сложные и интерактивные роботы.
Выбор концепции робота также является важным этапом. Вам следует определить, какие задачи вы хотите решить с помощью робота: это может быть обучение основам программирования, сбор данных с помощью датчиков, управление механизмами или создание автономного робота. Когда вы определитесь с концепцией, вы сможете выбрать соответствующий набор Lego и продолжить сборку и программирование вашего робота.
Не забывайте также о возможности использовать открытое программное обеспечение для управления роботом, такое как Lego Mindstorms или Arduino, которое позволяет расширить функциональность и возможности вашего робота.
Сборка робота: от сборки блока питания до установки датчиков
Процесс сборки робота из lego включает в себя несколько этапов, начиная от сборки блока питания и заканчивая установкой датчиков. Каждый этап требует ответственного подхода и аккуратности, чтобы получить работоспособное устройство.
1. Сборка блока питания
Первым шагом является сборка блока питания робота. Необходимо следовать инструкциям и правильно соединить все компоненты. Обратите внимание на правильное подключение проводов и фиксацию батарей.
2. Сборка шасси
После сборки блока питания можно приступить к сборке шасси робота. Соедините все необходимые детали, чтобы получить основу для дальнейшей установки компонентов.
3. Установка моторов
Следующим шагом является установка моторов на шасси. Убедитесь, что моторы правильно подключены и правильно закреплены на шасси. Также необходимо проверить их работоспособность.
4. Подключение контроллера
После установки моторов необходимо подключить контроллер к блоку питания и моторам. Следуйте инструкциям, чтобы правильно соединить все провода и убедиться в правильности подключения.
5. Установка датчиков
Последним этапом является установка датчиков на робота. В зависимости от целей и задач робота, может потребоваться установить различные датчики: сенсоры расстояния, цвета, света и другие. Установите их с учетом необходимых требований и подключите к контроллеру.
Важно помнить, что процесс сборки робота требует терпения и внимания. Если вы столкнетесь с трудностями или не уверены, как правильно выполнить этапы, обратитесь к документации или обучающим материалам, чтобы получить необходимую помощь.
Программирование и тестирование робота
Перед тем как приступить к программированию, важно определить цель и задачи, которые робот должен будет выполнять. Вы должны иметь понимание того, какие датчики и моторы вам понадобятся для реализации этих задач.
Существует несколько инструментов и языков программирования, которые вы можете использовать для программирования робота из Lego. Один из самых популярных инструментов — это Lego Mindstorms EV3, который обеспечивает графический интерфейс программирования. Он позволяет создавать программы, перетаскивая и соединяя блоки кода.
При программировании робота, важно учитывать физические ограничения и возможности конструкции. Например, если вы хотите, чтобы робот двигался определенным образом, вы должны учесть, сколько моторов у вас есть и как они могут быть использованы.
После написания программы вам следует приступить к тестированию робота. Проверьте, работает ли ваша программа так, как вы ожидали. Если возникают проблемы, не стесняйтесь вносить изменения в код и повторять тестирование.
Помните, что программирование робота является искусством, требующим терпения и практики. Будьте готовы экспериментировать, исправлять ошибки и улучшать свои навыки программирования по мере необходимости.
Как сделать робота из LEGO?
Согласно актуальной статистике конструкторы LEGO пользуются рекордной популярностью не только у детей, но и у представителей других возрастных категорий. Благодаря многообразию, продуманности и универсальности деталей, проработанных до мелочей, не возникает проблем с тем, как можно сделать робота из LEGO. Важно, что собрать простую модель легко сможет даже маленький ребенок, создав своими руками удивительную игрушку, и такой робот будет намного интереснее, чем неразбираемый.
Но, как показывает практика, данный процесс строительства конструкций по различным схемам выглядит привлекательным и для взрослых.
Как построить маленькую модель?
Сделать мини-робота, который будет маленьким, но при этом достаточно «удаленьким», очень просто. Для такой поделки можно использовать имеющиеся в наличии детали легендарного конструктора. В принципе результат будет определяться исключительно воображением самого создателя компактного образца фантастической робототехники. При этом сам процесс постройки небольшого робота является максимально простым и включает в себя несколько этапов.
В первую очередь необходимо будет сделать ноги будущего мини-робота. Для этого потребуется:
- взять две одинаковых детали, которые внешне похожи на ступни;
- прикрепить к каждой из них высокий куб;
- выделить коленные узлы;
- установить маленькие квадраты.
В качестве примера можно привести следующие схемы.
На ноги необходимо будет установить туловище робота-малыша. Если имеется в наличии гнущаяся деталь LEGO, то изначально устанавливают именно ее.
Следующий этап – это непосредственно формирование туловища конструкции. Здесь важно заметить, что торс должен быть массивным, даже с учетом компактности создаваемой модели.
По желанию можно установить решетки, а также заглушки разных цветов.
Схематически процесс создания туловища и его установка продемонстрированы на рисунках.
Теперь можно приступать к рукам будущей игрушки. Верхние конечности очень удобно делать из сопряженных цилиндров. Завершающими элементами при этом могут стать конусы. Здесь главное – не забыть установить хватающие элементы, то есть кисти. Стоит напомнить, что такие детали присутствуют во многих наборах LEGO. С другой стороны, можно обойтись и без данного пункта, но в таком случае не получится вооружить робота.
Все рассмотренные манипуляции, связанные с формированием рук, отображены наглядно на схемах.
На завершающей стадии останется сделать роботу голову. Ее роль здесь может сыграть обычный кубик, сформированный из двух квадратов. Как интересный вариант, можно по центру конструкции установить голову человечка, если таковая есть в распоряжении.
Кстати, возле головы робота нередко размещают колеса и прочие дополнительные элементы.
Создание большого робота
Может показаться, что создание большой по размерам модели робота окажется сложнее описанного выше процесса. Однако это не совсем соответствует действительности. Здесь, опять же, важно учесть, что постройка роботов, независимо от их габаритов, конфигурации и назначения, – это очень увлекательное занятие, и чаще всего не только для детей.
В принципе такую игрушку вполне можно сделать, используя уже рассмотренную схему, просто задействовав большее число компонентов. С другой стороны, подключив фантазию и воображение, создают самых необычных крупногабаритных роботов. Кстати, в такой ситуации наиболее правильным решением будет доверить проектирование именно юному конструктору.
Как в ситуации с мини-роботом, здесь следует начинать сборку с нижних конечностей. Для формирования ног понадобятся деталь в виде куба с крепежными элементами на каждой стороне, а также 3 круглые серые заглушки и синий квадрат. Важно, чтобы последний был на лицевой стороне срезан. Здесь имеется в виду гладкая поверхность, расположенная под углом 45 градусов.
Все перечисленные детали следует разместить по бокам кубика, как это показано на рисунке.
Дальнейшим алгоритм действий выглядит следующим образом.
- По бокам устанавливают по одной заглушке, после чего необходимо будет подобрать две скругленные и вытянутые детали, у которых будет по два отверстия и сквозные крепежные элементы на концах. Их соединяют и крепят к установленным ранее заглушкам. Кстати, здесь расположенные сверху отверстия можно заглушить. В итоге могут потребоваться 4 заглушки.
- В сквозное отверстие собранного элемента вставляют длинный шток, соединяя эту деталь с цилиндром. Остается на конец штока установить круглую заглушку.
- Перемещаясь ниже, монтируемую ногу продолжают серым кубиком. Важно, чтобы у него снизу лицевой плоскости имелось крепление.
- Ставят квадрат, имеющий на конце круг. Параллельно в качестве еще одного фиксатора монтируются еще один квадрат, а также деталь с треугольной лицевой стороной. В данном случае имеется в виду срезанный под углом 45 градусов квадратик.
- Посредством установленного круглого крепления монтируют конструктивный элемент, состоящий из двух кубиков.
- Добавляют снизу еще одну пластину, которая обеспечит максимальную устойчивость.
Весь описанный процесс сборки продемонстрирован на рисунке.
Следующий этап строительства большого робота – это создание его туловища. Эта процедура состоит из следующих действий.
- Над собранными ранее ногами робота устанавливается деталь в виде круга с четырьмя квадратами.
- В центре этого круга располагается пластина из двух квадратных элементов.
- По бокам выстраиваются высокие кубики, между которыми необходимо установить один куб с дополнительным креплением или же отверстием на лицевой стороне.
- Выкладываются по двум флангам элементы, сформированные из двух квадратов.
- Сверху ставят еще одну круглую деталь.
- На ней крепится массивная пластина, составленная из 6 квадратных деталей, а с тыльной стороны надо будет установить 2 квадрата с ручкой. Речь идет о том, что задняя часть должна оказаться немного выступающей за габариты всей конструкции. А вот под нее ставят элемент, имеющий трапециевидную форму, срезанный на конце. Важно, чтобы его вершина оказалась расположенной по направлению вниз.
- На противоположной стороне устанавливается аналогичная деталь.
- В центре помещается один круг, который закрывается элементом серого цвета, имеющим соответствующий размер.
- Крепятся срезанные серые кубы так, чтобы острые края были направлены вверх.
Как правильно собрать туловище, показано здесь.
Теперь можно перейти к созданию верхних конечностей игрушки. Наглядно данный процесс можно увидеть на рисунке.
Как в ситуации с остальными частями создаваемой конструкции, сборка рук тоже не вызовет каких-либо трудностей. И здесь, опять же, все будет зависеть от фантазии юного или же более взрослого автора проекта. Сам же процесс включает в себя следующие шаги.
- Берут элемент в виде небольшой полосы на два крепления.
- Сверху монтируют квадрат с хватательным элементом, который будет выполнять функции кисти робота.
- Устанавливают маленькую деталь с заглушенным концом.
- Как показано на рисунке выше, делают конструкцию в двух экземплярах.
Сборка боевого робота
Главное отличие такого образца техники, пусть и игрушечного, заключается в способности эффективно защищаться от нападений и атаковать самому. Как правило, с вооружением такого бойца проблем не возникает, поскольку во многих наборах его хватает. Для создания военной модели робота потребуются:
- белый или прозрачный срезанный треугольником кубик – 1;
- одинарные квадраты белого цвета – 2 (важно, чтобы один из них имел ровную верхнюю плоскость);
- высокие кубы (одинарные) – 2;
- сдвоенные кубы – 3;
- высокие цилиндры – 2;
- «краники» – 4 (по 2 серых и черных);
- усеченные конусы – 2;
- одинарные кубы, имеющие так называемые захватки – 2;
- черные скругленные «квадраты» – 2;
- кубы со срезанными (треугольными) верхами серого цвета – 2;
- плоский сдвоенный куб серого цвета – 1;
- кубы с пятью креплениями черного цвета – 3.
Подготовив все необходимое, можно приступать к самой сборке боевого робота. Первым делом концентрируются на формировании головы, постепенно переходя к туловищу.
Порядок действий будет следующим.
- Взять два высоких кубика, имеющих со всех сторон крепления. Важно соединять детали с боков, а не ставить их друг на друга. Низ одного куба должен сочленяться не с верхом, а с боковой стороной второго.
- На боковые крепления верхнего куба установить «круглые квадраты». Подобным образом формируются плечи будущего робота. Можно, конечно же, использовать детали обычной (квадратной) формы, но в таком случае руки модели не будут поворотными.
- Добавить к плечам захваты.
Рассмотренные этапы сборки отображены наглядно на рисунках.
Следующая стадия – сборка ног, которые также можно сделать двигающимися в «суставах». Все необходимые детали соединяются так, как это продемонстрировано на рисунке.
После останется только прикрепить стопы, которыми станут кубы со срезанными концами.
Схема сборки ног боевого робота выглядит следующим образом.
Теперь самое время вернуться к созданию верхних конечностей будущей игрушки. Именно в них будет размещаться вся огневая мощь этой боевой машины. Само оружие можно сформировать из прямоугольных элементов.
Завершающий этап строительства настоящей боевой машины.
Подводя итог, стоит заметить, что рекомендуется верхние, вооруженные «до зубов» конечности игрушки развести в стороны. Это минимизирует риск того, что руки могут сломаться или же будут мешать. На этом создание самодельного боевого робота можно считать завершенным.
Другие идеи
Здесь стоит рассмотреть, как быстро построить простейший вариант робота из «кирпичиков» LEGO. Такая модель станет оптимальным решением создания игрушки, когда у ребенка ограниченный ассортимент деталей. Как было отмечено, все элементы этих легендарных конструкторов имеют определенное предназначение.
При постройке простого робота можно подбирать детали одного цвета или схожих оттенков. Однако можно создать и креативную модель.
Первоначальный этап сборки предусматривает формирование туловища и выглядит следующим образом.
- Подобрать элемент из двух блоков по четыре кубика в каждом. Сзади прикрепить два высоких кубика, то есть имеющих по два квадрата, а на фронтальной части установить деталь аналогичной высоты во всю длину конструкции. Важно, чтобы у последней крепеж был спереди и вверху.
- На втором ярусе закрепить еще один высокий кубик (на один квадратик), а также аналогичный по высоте сдвоенный элемент и еще одиночный кубик. Следует помнить о наличии по бокам одинарных запчастей отверстий для рук.
- На фронтальной стороне установить длинную деталь из четырех квадратов.
- Поверх всей конструкции разместить две пластины.
Процесс постройки туловища.
После сборки торса переходят к нижним конечностям робота.
- Взять фрагмент на три блока по два квадрата.
- Закрепить три пластины, имеющие по одному креплению в центре. Эти детали должны расположиться под прямым углом к основе.
- Подобрать для создания ступней детали на три секции (желательно, чтобы они отличались по цвету).
- Сверху установить угловую деталь, которая рассчитана на два куба (верхняя часть первого срезана под 45 градусов). В результате должен получиться конструктивный элемент, напоминающий тапок.
- За собранным фрагментом разместить квадрат, который позволит выровнять форму получившегося тапка.
- На оставшемся свободным месте закрепить сдвоенный кубик другого цвета.
- Сочленить нижние конечности с уже собранным ранее торсом.
Вот так схематически выглядит сборка ног робота.
Для создания рук робота потребуется:
- в крепежные отверстия, расположенные по бокам, поместить круглые элементы, внешне напоминающие автомобильные фары;
- прикрепить узкую деталь на четыре квадрата;
- на сформированной основе установить черные квадраты, на концах которых должны находиться захваты.
Руки собирают по следующей схеме.
Следующий шаг в строительстве робота – это формирование его головы. Для этого поверх туловища устанавливается любая деталь, которая внешне будет похожа на соответствующий элемент собираемой конструкции. Подвижную голову делают из комплектующих с круглым (вращающимся) механизмом.
Создание головы отображено на этом рисунке.
На последнем этапе можно уделить внимание оформлению грудной клетки робота. Здесь можно использовать практически любые имеющиеся элементы. Это могут быть, к примеру, решетки и разноцветные заглушки, имитирующие кнопки. Так же эффектно будут смотреться плоские детали в виде пластин. По желанию создателя робота можно вооружить.
Завершение постройки простого робота.
Не секрет, что трансформеры покорили сердца широкой зрительской аудитории, и дети (актуально как для мальчиков, так и для многих юных представительниц прекрасного пола) не стали в данном случае исключением. Благодаря наборам LEGO у каждого поклонника этих роботов может появиться собственный и при этом самодельный Оптимус Прайм. Естественно, изначально необходимо будет позаботиться о наличии всех необходимых для сборки деталей. Кстати, этот процесс нередко увлекает всю семью. Ниже будет наглядно показано, как можно довольно быстро построить трансформера.
Начальная стадия создания популярного робота.
Сборка трансформера.
Для окончательного завершения всех работ необходимо просто поставить сделанного Оптимуса на ноги. Если необходимо будет трансформировать его в машину, то действуют по обратной схеме.
Естественно, рассмотренные выше варианты строительства роботов – это далеко не полный перечень возможностей, которые предоставляет любителям конструирования LEGO. И здесь уникальность моделей будет определяться не только габаритами и количеством использованных при сборке деталей. Имеется в виду создание механизированных и управляемых конструкций. В итоге нередко миниатюрный робот с интересными функциями произведет на ребенка и его родителей лучшее впечатление, чем его большой родственник.
Речь идет о том, что разработчик позаботился о доступности, помимо стандартных деталей, таких элементов, как контроллеры, различные датчики, моторчики и специальное программное обеспечение.
Примеры самоделок роботов из Lego можно найти в следующем видео.
Как сделать манипулятор из лего ev3 инструкция по сборке
Робот-манипулятор Arm H25 — стандартная модель для базового образовательного набора LEGO Mindstorms EV3 Education. Инструкцию для сборки робота-манипулятора Arm H25 можно использовать и с домашней версией LEGO Mindstorms EV3 — в этом случае чтобы построить робота потребуется найти несколько дополнительных деталей.
Инструкция по сборке.
Использованные компоненты: базовый набор LEGO Mindstorms Education EV3, артикул 45544

Сайт проекта: http://robotsquare.com/2013/10/01/education-ev3-45544-instruction/
Другие проекты на этой платформе:
- Двуногий робот из Arduino, LEGO и деталей 3D печати
- LEGO EV3 робот-художник
- SpinnerBot из LEGO Mindstorms
- LegoGun — двуствольный пистолет из Lego Mindstorms EV3
- Спирограф — рисующий робот из LEGO Mindstorms EV3
- Бесполезная коробка из Lego Mindstoms EV3
- Гексапод из Lego Mindstorms EV3
- Роботизированная рука из Lego Mindstorms EV3
- Подъемные механизмы из LEGO Mindstorms
- Прибор автоматической подачи одноразовых стаканчиков из LEGO Mindstorms
- Робот-кабан-динозавр DINOR3X из LEGO Mindstorms EV3
- Znap — робот из LEGO Mindstorms EV3
- Робот-сортировщик (Color Sorter) из LEGO Mindstorms EV3
- Робот Educator Vehicle из LEGO Mindstorms EV3
- Робот-сигвей (Gyro Boy) из Lego Mindstorms
- Робот-гексапод NXTAPOD из LEGO Mindstorms. Модель Даниэля Бенедеттелли
- Робот-щенок (Puppy) из LEGO Mindstorms EV3
- Лимоноид — робот, продающий напитки
- Киноаппарат из Lego Mindstorms
- Принтер из Lego Mindstorms «STALKER ver. 2.0»
- Робот-пожарный из LEGO Mindstorms
- Крестики-нолики — ARBUZIKI-TEAM
- EZ Wilber — говорящий балансирующий робот из Lego Mindstorms
- Ev3 Print3rbot — робот-художник из Lego Mindstorms
- 3D-принтер из Lego печатает шоколадом
- Lego Mindstorms NXT 2.0 играет в шахматы
- Робот-гексапод из Lego Mindstorms NXT 2.0
- Робоноги из Lego Mindstorms
- Lego Mindstorms-экскаватор, управляемый Microsoft Kinect
- Lego-робот DIZZ3
- Крестики-нолики для Lego-робота
- Lego Mindstorms EV3 3D-принтер 2.0
Перейти в каталог DIY-проектов роботов

Как добавить робопроект в каталог?

Теги: Lego Education, Lego Mindstorms, робот-манипулятор
- РЕГИСТРАЦИЯ
- ВОЙТИ
- НОВОСТИ
- ЭКСПЕРТЫ
- НАПРАВЛЕНИЯ
- СОРЕВНОВАНИЯ
- РЕЕСТР
- ГЛАВНАЯ
- — РЕГИСТРАЦИЯ
- — ВОЙТИ
- — НОВОСТИ
- — 3D-МОДЕЛИРОВАНИЕ
- — ГРАФИЧЕСКИЙ ДИЗАЙН
- — ПРОГРАММИРОВАНИЕ
- — ЭЛЕКТРОНИКА
- — РОБОТОТЕХНИКА
- СОРЕВНОВАНИЯ
- РЕЕСТР
E-mail
Dep-courses@ya.ru
LEGO MINDSTORMS EV3 семь инструкций по сборке.
Конвеер-сортировщик шариков
Робот сортирует шарики по двум корзинам.
СКАЧАТЬ ИНСТРУКЦИЮ
Вездеход
Робот на гусеницах
СКАЧАТЬ ИНСТРУКЦИЮ
Машина с пониженной передачей
В конструкции используется передача для увеличения силы
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-чертежник
Робот рисует разметку
СКАЧАТЬ ИНСТРУКЦИЮ
Робот манипулятор
Робот позволяет перемещать объекты в ограниченном пространстве.
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-бот
Простой бот для программирования передвижения.
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-сортировщик
Робот программируется при помощи цветных квадратиков
СКАЧАТЬ ИНСТРУКЦИЮ
Политика в отношении обработки персональных данных
Муниципальное бюджетное общеобразовательное учреждение
«Школа № 42 с углубленным изучением отдельных предметов»
городского округа Самара.
Индивидуальный учебный проект
Тема: «Как собрать манипулятор из конструктора Лего на основе микропроцессора EV–3»
Предмет: технология, робототехника
Выполнил: Михайлычев Никита, ученик 9 «Б» класса
Руководитель: Пародина Ольга Александровна,
Председатель комиссии: __________________________________________
Члены комиссии: ________________________________________________
С О Д Е Р Ж А Н И Е
ВВЕДЕНИЕ 3
- I. ИССЛЕДОВАНИЯ ПО ПРОБЛЕМЕ 4
- Проанализировать существующие решения.
- Составить техническое задание на проектирование.
- Разработать и описать конструкцию манипулятора.
- Написать программу управления конструкцией.
- Протестировать модель.
- Оценить получившиеся результаты.
-
Обоснование выбора темы. 3 Актуальность темы 3
1.1 Анализ существующих решений 4
1.2 Техническое задание на проектирование 7
-
II. ПРАКТИЧЕСКОЕ РЕШЕНИЕ ПРОБЛЕМЫ 7
2.1 Разработка и описание конструкции манипулятора 7
2.2 Разработка и описание ПО. 9
ЗАКЛЮЧЕНИЕ 11
Оценка проекта 11
Информационные источники 12
Введение.
Обоснование выбора темы.
Занимаясь на спецкурсе «Конструирование» мне приходилось собирать разные модели из конструктора Лего, но модель манипулятора я не собирал. За последнее время появилось много видеороликов про такие устройства, можно увидеть, как они устроены и как работают. Но всегда интереснее увидеть работу такого устройства вживую, поэтому я решил собрать эту модель.
Актуальность темы.
На уроках технологии в 7 классе при изучении технологических систем рассматривают разные механизмы и электротехнические устройства, в том числе на примере манипулятора. Этот материал подробно изложен в учебниках, при выполнении заданий учащиеся пользуются теоретической информацией. Если построить модель манипулятора, то урок будет проходить интереснее и более наглядно.
Постановка проблемы.
Хотелось, чтобы для проведения уроков технологии по изучению механизмов и электротехнических устройств в технологических системах использовалась рабочая модель манипулятора, но в настоящее время такой модели нет.
Цель проекта.
Разработать и построить действующую модель манипулятора в форме руки из конструктора Лего на основе микропроцессора EV–3.
План работы над проектом.
I. Исследование по проблеме.
1.1 Анализ существующих решений.
Манипулятор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века, благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека лучи. Механические руки стали устанавливать там, куда доступ человека нежелателен, а сам он, управляющий руками, располагался в другом, безопасном помещении. Сейчас манипуляторы используют в разных производствах.


Рисунок 1. Манипулятор в металлургии
Кран-манипулятор — кран стрелового типа, установленный на автомобильном шасси и служащий для его загрузки и разгрузки одиночными и сыпучими грузами в контейнерах и их транспортировки.

Рисунок 2. Передвижной кран-манипулятор
Для людей с ампутированной конечностью существует Бионический протез.
Bebionic —биоэлектрическая искусственная кисть с приводом электромеханическим и микропроцессорным контролем, созданная для восстановления функции ампутированной конечности.

Рисунок 3. Бионический протез
Принцип действия бионического протеза:
После травмы или в ходе болезни конечность ампутируют. Оставшаяся культя состоит из множества тканей: кожи, мышц, костей, сосудов и нервов. Хирург во время операции выводит сохранившийся двигательный нерв на остающуюся крупную мышцу. После заживления операционной раны нерв может передавать двигательный сигнал. Этот сигнал воспринимает датчик, установленный на протезе. В процессе восприятия нервного импульса участвует сложная компьютерная программа.
Минусы такого протеза:
У такого протеза единственный минус. Это его стоимость.Стоимость бионического протезирования пока высока и может достигать в сложных случаях миллионов рублей. Однако возврат к полноценной жизни трудно оценить в материальном исчислении. По сути, установка бионических протезов – единственная возможность для инвалида вернуться к нормальной жизни: строить и осуществлять планы, содержать семью, добиваться карьерных вершин.
NiryoOne – это 6-осевой манипулятор, созданный специально для производителей, системы обучения и небольших компаний. Согласно Niryo, имеющий шесть осей перемещения манипулятор позволяет выполнять задачи, которые до сих пор были доступны исключительно промышленным роботам. Манипулятор может выбрать и положить на место предметы с помощью вакуумного насоса, захвата или электромагнита. Он поможет автоматизировать 3D-принтер, позволит сверлить отверстия в изделиях. Он может выполнять необходимые домашние работы и даже творчески развлекать детей.

Рисунок 4. Манипулятор серии NiryoOne
Минусом такого манипулятора является его большая стоимость, его можно приобрести за сумму 20000 – 200000 долларов.
1.2 Техническое задание на проектирование.
Проведя анализ существующих манипуляторов, делаем вывод, что форма устройства напоминает руку человека, движения осуществляются с помощью механизмов, таких как рычаг, зубчатые передачи.
Необходимо спроектировать и собрать механическую руку из конструктора ЛЕГО. Манипулятор должен захватывать предметы и перемещать их в нужное место. Для обеспечения автоматической работы устройства необходимо программное обеспечение.
II. Практическое решение проблемы.
2.1 Разработка и описание конструкции манипулятора.
1 
 ) Для создания самой руки требуется основание, которое могло бы удержать эту руку. После сборки основания на него нужно установить Миникомпьютер Lego MINDSTORMS EV3 и Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом, которые приводили бы в движение руку, а также датчик касания, при нажатии на который рука бы останавливалась в нужном месте.
) Для создания самой руки требуется основание, которое могло бы удержать эту руку. После сборки основания на него нужно установить Миникомпьютер Lego MINDSTORMS EV3 и Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом, которые приводили бы в движение руку, а также датчик касания, при нажатии на который рука бы останавливалась в нужном месте.

2) После сборки основания создаем саму руку. Для того, чтобы рука могла подниматься или опускаться, ставим на конструкцию руки Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом и датчиком цвета, для того чтобы рука поднималось на определенную высоту.

3) После сборки конструкции руки нужно собрать захватывающий механизм из Среднего Сервомотора Lego MINDSTORMS EV3, с зубчатым механизмом выполняющий роль пальцев.




4 ) После сборки захватывающего механизма устанавливаем его на конструкцию руки и подключаем все сервомоторы и датчики к Миникомпьютеру.

2.2 Разработка и описание ПО.
Прежде чем приступать к составлению компьютерной программы, необходимо составить логическую последовательность действий манипулятора.
Сомкнуть захват, захватив предмет.
Повернуть манипулятор на определенный угол.
Повернуть манипулятор в исходное положение.
Повторить программу необходимое число раз.
В системе ПО записывается подпрограмма для калибровки и синхронизации моторов:

Затем записываем основную программу. Для этого мы должны в программе запрограммировать две кнопки, при нажатии одной из них рука повернулась в определенную сторону, в зависимости от того, где находится предмет:

Потом мы должны запрограммировать средний и большой сервомотор, находящиеся на конструкции руки для того, чтобы рука опустилась с помощью большого сервомотора и захватила предмет с помощью среднего сервомотора:

После того, как рука захватила предмет, мы записываем в программе для большого сервомотора на основании программу для возращения руки в то же положение, в котором она была изначальна. И для среднего, и большого сервомотора находящиеся на конструкции руки мы записываем программу для того, чтобы рука опустилась и отпустила предмет:

1.Оценка проекта.
Мне все же удалось достичь цели проектирования, потому что моя модель манипулятора соответствует техническому заданию на проектирование. Манипулятор выполняет следующие действия: захватывает предмет, осуществляет подъем предмета, затем поворачивается на заданный угол, опускает предмет и раскрывает захват, долее поднимается и возвращается в исходное положение. Работа манипулятора выполняется по заданной программе.
Полученная модель будет являться хорошим наглядным пособием для уроков технологии в 7 классе при изучении механизмов и электротехнических устройств в технологических систем.
Работая над этим проектом, мне потребовались такие умения, как: находить и обрабатывать информацию, читать схемы, чертежи, моделировать и конструировать устройства из конструктора Лего, составлять компьютерную программу, используя язык объектно-ориентированного программирования, работать с текстовым редактором, создавать презентацию в приложении Power point.
Информационные источники: